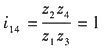
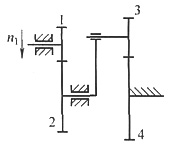
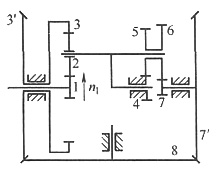
一、计算题1. 求下图所示轮系的传动比i
14。已知各轮齿数为:z
1=z
2'=25,z
2=z
3=20,z
H=100,z
4=20。
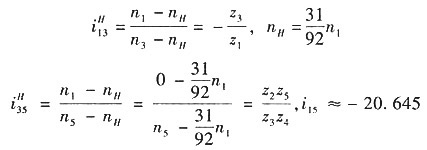
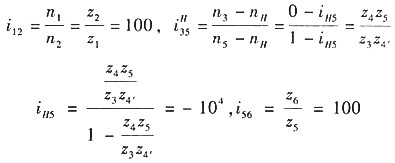
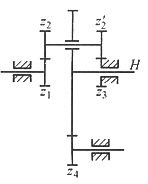
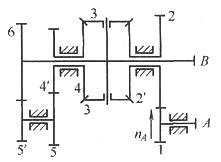
2. 如图所示为一个3K行星轮系,其中z
1=31,z
2=15,z
3=61,z
4=18,z
5=64,m=2mm,α=20°。
(1)求i
15。
(2)为了使齿轮2不发生根切,应采用哪种变位修正?
(3)齿轮1、2应采用哪种变位齿轮传动?
(4)齿轮2有几个节圆?
(1)
(2)正变位修正。
(3)等变位齿轮转动。
(4)二个节圆。
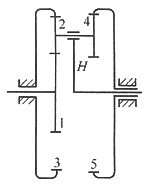
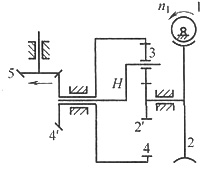
3. 在下图所示的复合轮系中,已知z
1=z
5'=1,z
3=99,z
4'=101,z
2=z
4=z
5=z
6=100,各轮的模数相同,压力角相等。
(1)求i
16。
(2)若ω
1顺时针方向转动,那么ω
6的转向如何?
(3)回归轮系3-4-4'-5中,为满足同心条件,应采用哪种变位传动方案较好?为什么?若此回归轮系既要满足同心条件,又要保证实现标准齿轮传动,应采用什么方法?
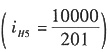
(4)若已知蜗杆1、蜗轮2组成的传动中,它们的模数m=2,蜗杆直径系数q=13,那么这对蜗杆传动的中心距a
12为多少?
(1)
i
16=i
12i
H5i
56=-10
8 (2)ω
6顺时针方向转动。
(3)应采用z
3、z
4正传动,z
5、z
4标准安装正常齿,因为正传动可使强度略有提高。
若既要满足同心条件,又要保证实现标准齿轮传动,可改变齿数,即将z
3变为101,使z
3+z
4=z
4+z
5。虽可实现上述要求,但传动比i
H5变了
。
(4)
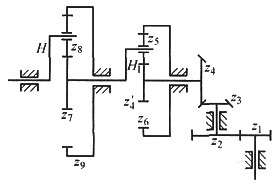
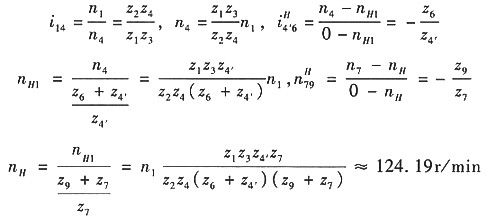
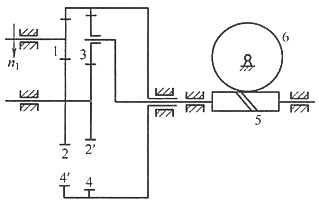
4. 下图所示复合轮系中,设已知n
1=3549r/min,各轮齿数为:z
1=36,z
2=60,z
3=23,z
4=49,z
4'=69,z
5=31,z
6=131,z
7=94,z
8=36,z
9=167。试求系杆H的转速n
H。
5. 如图所示轮系中,z
1=16,z
2=32,z
2'=20,z
3=40,z
3'=2,z
4=40。若n
1=800r/min。
(1)求蜗轮的转速n
4及各轮的转向。
(2)z
2'、z
3为一对斜齿圆柱齿轮,为了使轴Ⅲ上轴承受力合理(即抵消一部分),试确定这两齿轮的旋向?
(1)

2-2'转向箭头向左,3-3'转向箭头向右,蜗轮4逆时针方向转动。
(2)齿轮3右旋,齿轮2左旋。
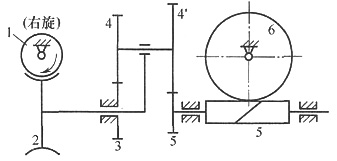
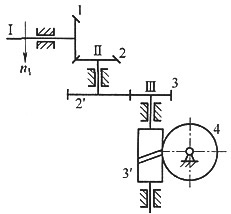
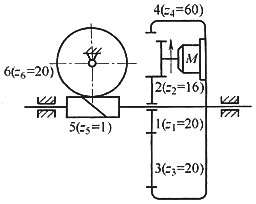
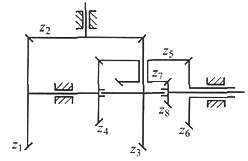
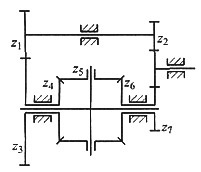
6. 如图所示轮系中,所有的齿轮均为渐开线直齿圆柱齿轮。已知

=1,α=20、z
1=20,m=2mm,液压马达M装在内齿轮4上,其转速n
M=750r/min,转向如图所示,z
5、z
6是一对蜗杆蜗轮传动,z
5=1(旋向如图所示),z
6=20,q=13,m=2mm,α=20°,求:
(1)转速n
2、n
4、n
6的大小和方向。
(2)齿轮2的分度圆直径d
2。
(3)齿轮1的分度圆有几个?节圆有几个?
(4)z
5、z
6这对蜗杆传动的中心距a
56。
(1)n
2=n
M=750r/min,转向箭头向上

n
4=125r/min,转向箭头向上
,蜗轮转向为逆时针方向
(2)d
2=mz
2=32mm
(3)齿轮1有一个分度圆,二个节圆(如果齿轮1、2、3均为标准齿轮标准安装,齿轮1的两个节圆重合)。
(4)
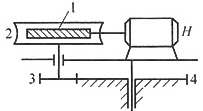
7. 如图所示起重机的旋转机构中,已知电动机的转速n=1440r/min。各轮齿数为:z
1=1(右旋),z
2=40,z
3=15,z
4=180。试确定该起重机机房平台H的转速n
H。

n
H=2.77r/min
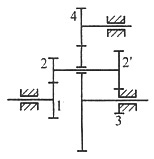
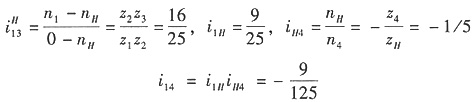
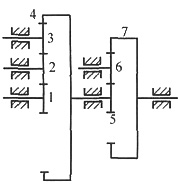
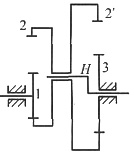
8. 求如图所示轮系的传动比i
14。已知z
1=z
2'=25,z
2=z
3=z
4=20,z
H=100。
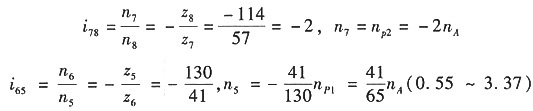
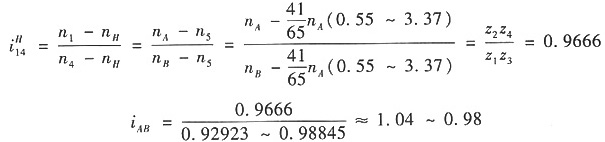
9. 如图所示轮系中,不同斜齿轮对的模数和螺旋角不相同。已知各轮齿数分别为:z
1=46,z
2=34,z
3=26,z
4=34,z
5=130,z
6=41,z
7=57,z
8=114,P
1、P
2均为带轮,其转速比可在一定范围内变化,n
p1/n
p2=0.55~3.37,计算轴A和轴B之间的传动比i
AB(计算结果小数点后保留两位)。
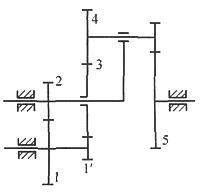
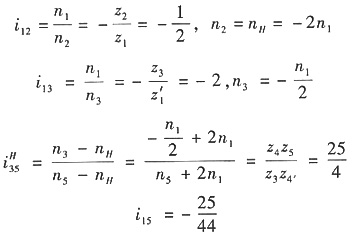
10. 在如图所示轮系中,已知各轮的齿数:z
1=2(右旋),z
2=60,z
4=40,z
5=20,z
6=40,且各轮均为正确安装的标准齿轮,各轮的模数相同。当轮1以n
1=900r/min按图示方向转动时,求轮6转速n
6的大小和方向。
z
3=z
6+z
5+z
4=100
n
6=67.5r/min,转向箭头向下
11. 在如图所示轮系中,已知各轮齿数为:z
1=z
2=z
3=z
5=z
6=20。已知齿轮1、4、5、7为同轴线,试求该轮系的传动比i
17。
z
4=z
1+2z
2+2z
3=100,z
7=z
5+2z
6=60

i
17=i
14i
57=-15
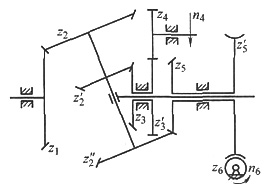
12. 如图所示轮系中,已知各轮齿数为:z
1=z
3=40,z
2=z
1'=20,z
4=50,z
4'=15,z
5=75。试求传动比i
15。
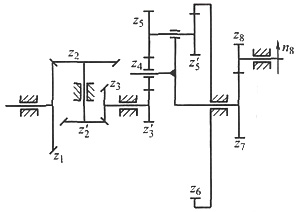
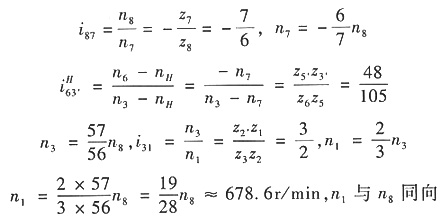
13. 如图所示轮系中,已知z
1=90,z
2=60,z
2'=30,z
3=30,z
3'=24,z
5=15,z
5'=30,z
6=105,z
7=35,z
8=30,n
8=100r/min,转向如图所示。试求n
1的大小和方向。
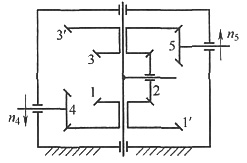
14. 如图所示轮系中,已知各齿轮齿数为:z
4=z
5=24,z
1'=z
3'=56,z
1=z
3=40,z
2=20。齿轮4、5转速大小分别为n
4、n
5,方向如图所示。试求以下三种情况下构件H的转速n
H的大小和方向。
(1)齿轮4、5的转速大小相等。
(2)齿轮4的转速为175r/min,齿轮5的转速为140r/min。
(3)齿轮4的转速为140r/min,齿轮5的转速为175r/min。
(1)设n
4为正,n
5为负,n
H=0。
(2)n
H=7.5r/min,转向箭头向左。
(3)n
H=-7.5r/min,转向箭头向右。
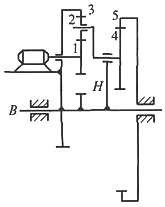
15. 如图所示的减速装置中,齿轮1装在电动机的轴上(电动机外壳固定在齿轮3上)。已知各轮的齿数为z
1=z
2=20,z
3=60,z
4=90,z
5=210,电动机的转速n=1440r/rain。求轴B的转速n
B及其回转方向。
n
B=n
H=n
3,n
1=n=1440r/min
16. 在如图所示轮系中,各齿轮齿数为:z
1=z
2=40,z
2'=z
2"=z
3=z
4=20,z
3'=z
5=40,z
5'=60,z
6=2(右旋)。又知n
4=1200r/min,n
6=1800r/min,转向如图所示,试求轴1的转数n
1的大小及转向。
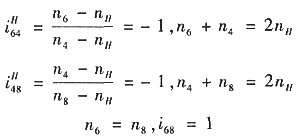
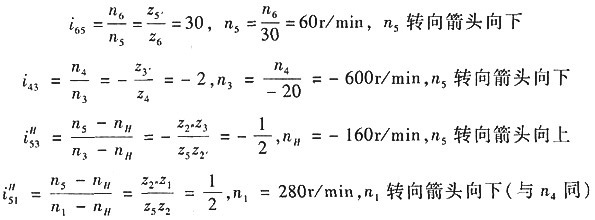
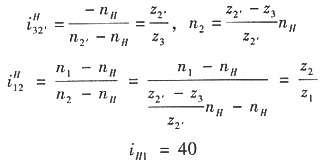
17. 如图所示轮系中,已知各轮齿数关系为:z
1=z
2=z
3,z
4=z
5=z
6,z
7=z
8=z
6/2。试求传动比i
68。
第一种算法

第二种算法
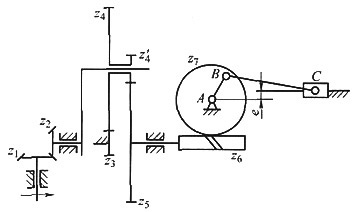
18. 如图所示传动机构中,已知轮系z
1=z
2=20,z
3=z
4'=25,z
4=z
5=100,蜗杆z
6=1(右旋),蜗轮z
7=75,一偏置曲柄滑块机构的曲柄同轴固连在蜗轮上,曲柄长为L
AB,连杆长为L
BC,偏距为e,行程速比系数K=1.4,原动件为齿轮1,其转动向如图所示。
(1)当滑块C向右远离蜗轮中心为工作行程时,蜗轮的转向是否合理?简述理由。
(2)当齿轮1转过40r时,曲柄滑块机构的滑块C是否到达右极限位置,若没有达到右极限位置,则蜗轮需再转多少角度才能到达?
(1)
z
6右旋,蜗轮转向为顺时针方向。
滑块到达右极限位置时,AB与BC拉直;滑块到达左极限位置时,AB与BC重叠,有急回特性。蜗轮转向合理。
(2)

轮1转40r,蜗轮7转360°。

一个工作行程中AB转180°+30°=210°。
若滑块从左极限位置开始工作行程,轮1转40r时滑块未能到达右极限位置,则蜗轮还应再转30°。
19. 在如图所示轮系中,已知各齿轮的齿数分别为:z
1=28,z
3=78,z
4=24,z
6=80,n
1=2000r/min,当分别将轮3或轮6刹住时,试求转臂H的转速n
H。
轮4、5、6及3(H')组成周转轮系
轮1、2、3及/4组成周转轮系
刹住3轮n
3=0
由②得

刹住6轮n
6=0,n
4=n
1 由①得

代入②得

,n
H与n
1转向相同
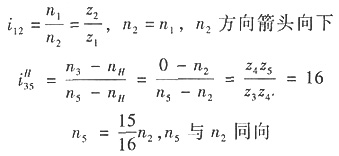
20. 如图所示轮系中,已知各轮的齿数:z
1=20,z
2=40,z
3=15,z
4=60,轮1的转速n
1=120r/min,转向如图所示。试求轮3的转速n
3的大小和方向。
n
3=3n
H=-300r/min,转向与n
1相反
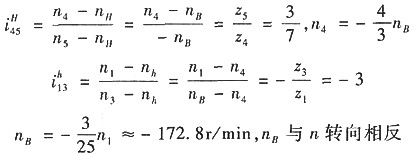
21. 如图所示轮系中,已知各轮齿数为:z
1=99,z
2=100,z
2'=101,z
3=100,z
3'=18,z
4=36,z
4'=14,z
5=28,A轴的转为速,n
A=1000r/min,转向如图所示,求B轴的转速n
B,并指出其转向。
22. 如图所示轮系中,已知各轮齿数为:z
1=20,

,z
3=39,求系杆H与齿轮1的传动比i
H1。
23. 如图所示轮系中,已知z
1=69,z
2=40,z
3=68,z
4=z
5=z
6=67,z
7=40,求轴I和轴H的传动比i
IH。
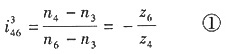
24. 如图所示轮系中,已知各轮齿数分别为:z
1=30,z
2=60,z
3=150,z
4=40,z
5=50,z
6=75,z
7=15,z
3'=z
7'=180,z
8=150,n
1=1800r/min,试求轮7的转速及其方向。
由①得n
3=-n
7 ④
由②得-n
H=0.25n
7-0.25n
H,n
H=

n
7 ⑤
将④、⑤代入③得
,n
7转向与n
1同,箭头向上
25. 如图所示轮系中,已知各齿轮齿数分别为:z
1=18,z
2=45,z
2'=z
4=50,z
4'=40,z
5=30,z
5'=20,z
6=48,n
A=100r/min,方向如图所示。试求B轴转速大小及方向。
(1)
把①、②代入③得
n
B=-200r/min,n
B与n
A反向,箭头向下
26. 在下图所示轮系中,已知各轮齿数为:z
1=1(右旋),z
2=64,z
2'=z
4'=30,z
3=z
5=20,z
4=70;蜗杆转速n
1=1280r/min,齿轮5转速n
5=300r/min,转向如图所示。试确定n
H的大小和方向。
n
H=-44.67r/min,方向箭头向下
27. 如图a所示为动平衡实验机的传动系系统原理图。已知齿数为:z
1=z
3=z
6=z
8=20,z
2=z
4=z
5=z
7=19,z
9=40,z
10=1。求证:
(1)当蜗杆10的手柄不动时,工件与补偿盘无相对转动;当手柄转动时,工件与补偿盘有相对转动。
(2)当将图a修改为图b,且z
1=z
4=20,z
2=z
3=17时,试问传动系统能否实现图a所示的功能,为什么?
(1)当手柄不动时,轮系为定轴轮系,F=3×5-2×5-4=1,
,所以工件与补偿盘之间无相对转动。
当手柄转动时,F=3n-(2p
L+p
H)=3×7-(2×7+5)=2,轮系为差动轮系,蜗轮9为系杆H,故工件与补偿盘间有相对转动。
(2)下图b所示传动系统能实现图a传动系统的功能。
图b所示传动系统中的手柄不动时:F=3n-(2p
L+p
H)=3×3-(2×3+2)=1,轮系为定轴轮系。
,工件与补偿盘间无相对转动。
图b所示传动系统中的手柄活动时:F=3n-(2p
L+p
H)=3×5-(2×5+3)=2,轮系为差动轮系。蜗轮9为系杆,故工件与补偿盘间有相对运动。
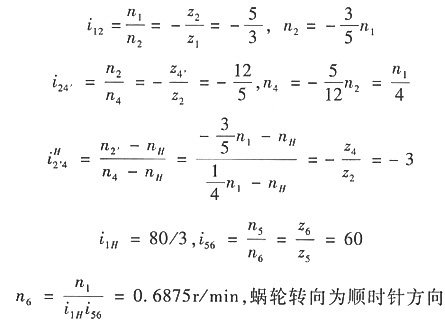
28. 如图所示轮系各轮齿数为:z
1=15、z
2=25、z
2'=z
3=20、z
4=60、z
4'=55,蜗杆z
5=1,蜗轮z
6=60。n
1=1100r/rain,方向如图所示。求蜗轮的转速n
6的大小与方向。
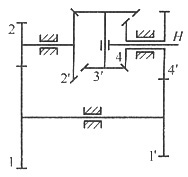
29. 已知下图所示轮系中各轮的齿数:z
1=z
4'=40,z
1'=z
2=z
4=20,z2'=z
3=30,z
3'=15。求i
1H。












 深色:已答题 浅色:未答题
深色:已答题 浅色:未答题